
Prototype 1

This was our first attempt at the rope climb bot. We made it simple with 7 small tires that were attached close to the motor. We then used gears to make it stronger and be able to pull itself up the rope. But we found out the tires were either to close or to big, when we put it on the rope it got jammed because of this reason.
Prototype 2
Our second prototype was very similar to the first, except we took the wheels off and used gears instead. We thought gears would be a better choice then tires because of the teeth on them that would allow it to dig into the rope giving it less of a chance to slip. This idea worked for us but it was still not strong enough to pull or bot up the rope. We tried to re-gear it and make it stronger but one motor wasn't strong enough to pull our bot up.
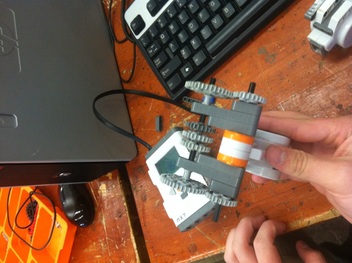
Prototype 3

Our third prototype was two of our second prototype connected together to add more power and have a better chance at making it up the rope. This would have worked if we had been able to shorten the distance between the two set of gears so it could grab on to the rope tighter. But unfortunately we ran out of time and were not able to complete the bot but we used the engineering design process to help us create and make better prototypes.
Engineering Design Process
1. Identify the problem:
We had to create a robot that would be able to go to the top of the rope and make its way back down to the bottom of it.
2. Research the problem:
The research that we came up with was that we needed to make a robot that would be able to hold onto the rope and give it enough traction so it would be able to make its way to the top. We also concluded that we need to have a light robot so it would be able to make it's way up and at the same time be able to go back down without going to fast and crashing into the floor.
3. Develop solutions:
We just made a robot that was similar to our research. We used one motor that had a hole just big enough for the rope to fit and we used gears so that it would be able to dig into the rope which would give us the most traction while climbing up the rope. We also made the motors use the bear minimum so it could be as light as possible and be able to climb the rope.
4. Select the best solution:
The best solution that we had was to make two identical motors with gears in the middle. Then we would connect them together to add more power and traction.
5. Construct a prototype:
When we built our prototype we just made it similar to our research. We made a small opening and used gears for better traction. We made many different ones though due to problems that we had with them.
6. Test and evaluate:
When we tested our first prototype we noticed that it didn't have enough traction for it to move up the rope, it kept slipping. So we put gears on instead of wheels and we saw how it worked better, but it still wasn't strong enough. So we added another identical motor to our second prototype and tried to make it work. It was powerful enough and had enough traction but it was to heavy. Unfortunately we ran out of time and were not able to complete our third prototype.
7. Communicate solutions:
All we did was add more power and traction by adding a motor and trying to use gear trains on it to make it stronger and make it to the top of the rope.
8. Redesign:
We just kept redesigning until we came up with a solution we thought worked best. But we ran out of time and were never able to complete our last prototype.
We had to create a robot that would be able to go to the top of the rope and make its way back down to the bottom of it.
2. Research the problem:
The research that we came up with was that we needed to make a robot that would be able to hold onto the rope and give it enough traction so it would be able to make its way to the top. We also concluded that we need to have a light robot so it would be able to make it's way up and at the same time be able to go back down without going to fast and crashing into the floor.
3. Develop solutions:
We just made a robot that was similar to our research. We used one motor that had a hole just big enough for the rope to fit and we used gears so that it would be able to dig into the rope which would give us the most traction while climbing up the rope. We also made the motors use the bear minimum so it could be as light as possible and be able to climb the rope.
4. Select the best solution:
The best solution that we had was to make two identical motors with gears in the middle. Then we would connect them together to add more power and traction.
5. Construct a prototype:
When we built our prototype we just made it similar to our research. We made a small opening and used gears for better traction. We made many different ones though due to problems that we had with them.
6. Test and evaluate:
When we tested our first prototype we noticed that it didn't have enough traction for it to move up the rope, it kept slipping. So we put gears on instead of wheels and we saw how it worked better, but it still wasn't strong enough. So we added another identical motor to our second prototype and tried to make it work. It was powerful enough and had enough traction but it was to heavy. Unfortunately we ran out of time and were not able to complete our third prototype.
7. Communicate solutions:
All we did was add more power and traction by adding a motor and trying to use gear trains on it to make it stronger and make it to the top of the rope.
8. Redesign:
We just kept redesigning until we came up with a solution we thought worked best. But we ran out of time and were never able to complete our last prototype.
