
Table BOt

This is the table bot that our group created. It has the same design we had used for the parking bot and the line follower. It consists of one touch sensor in the front and two motors on the side of it. The bot has to motors to help weigh down the front since we couldn't get the sensor to become pressed.
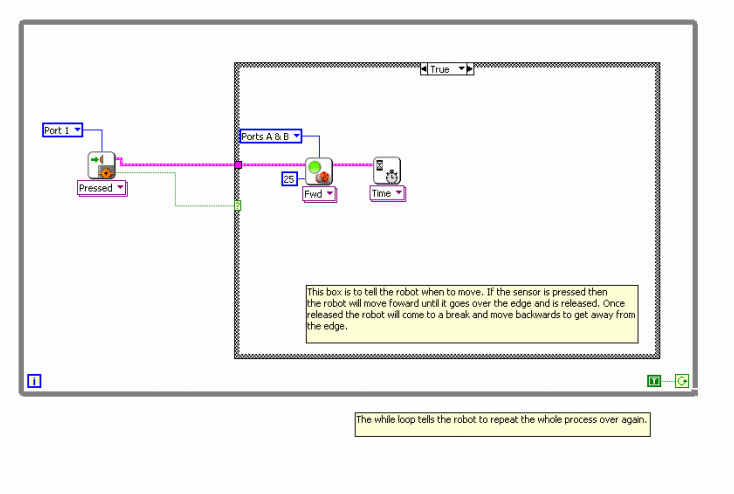
Program for Table Bot
Portfolio Guide Reflection
1. State the assignment (problem/project) in your own words.
the assignment was to get a bot to stay on the table without falling off for two straight minutes.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We needed to know how to program a robot using the touch sensor so that it wouldn't fall off of the table.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
The first thing we tried was putting a touch senor on the front and the back. The sensor on the back didn't really do to much so we took it off and kept the front sensor on. We tried to program it but it didn't work out to well so we decided to put two on in the front. We didn't have any success with this so we went back to having one sensor on in the front. We reprogrammed it and got it to work but not unless it was weighed down in the front. We weighed it down with more motors and got it to work.
4. Describe the final output / product in detail: (what are we looking at?)
The robot was the same as our line follower bot and our parking space bot. This bot had a touch sensor in the front though and had two motors in the front to help put weight on the sensor so it could be pressed in.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
We were told that it hadn't worked because it needed more weight in the front to push the sensor in. We added to motors and it worked.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
We learned how how to program a bot using a touch sensor to keep it from falling off a table.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
I would add another senor to the back instead of keeping it at one on the front. Except i would have made the back sensor more efficient then we had it before.
the assignment was to get a bot to stay on the table without falling off for two straight minutes.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We needed to know how to program a robot using the touch sensor so that it wouldn't fall off of the table.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
The first thing we tried was putting a touch senor on the front and the back. The sensor on the back didn't really do to much so we took it off and kept the front sensor on. We tried to program it but it didn't work out to well so we decided to put two on in the front. We didn't have any success with this so we went back to having one sensor on in the front. We reprogrammed it and got it to work but not unless it was weighed down in the front. We weighed it down with more motors and got it to work.
4. Describe the final output / product in detail: (what are we looking at?)
The robot was the same as our line follower bot and our parking space bot. This bot had a touch sensor in the front though and had two motors in the front to help put weight on the sensor so it could be pressed in.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
We were told that it hadn't worked because it needed more weight in the front to push the sensor in. We added to motors and it worked.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
We learned how how to program a bot using a touch sensor to keep it from falling off a table.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
I would add another senor to the back instead of keeping it at one on the front. Except i would have made the back sensor more efficient then we had it before.
